Hallo,
es gibt immer mal Probleme mit 0-Byte Ergebnisdateien. Die entstehen normalerweise aus 2 Gründen:
- die Software kann den Laser nicht erkennen
- die Software findet keine Überschneidungspunkte
Zum ersten Bereich gab es bereits den Beitrag mit den Filtern. Der Beitrag ist leider nur die halbe Wahrheit. Wenn der Hintergrundbereich ungünstig ist (Folie/Farbe wurde verwendet, dazu kommen wir unten noch) dann sind die Reflexionen vom Laser eventuell nicht zu erfassen.
Was ist aber erstmal das mit den Überschneidungspunkten?
Einfachster Fall
- Der Laser ist so ausgerichtet, dass er zwar den Hintergrund, nicht aber das Objekt anschneidet, oder Teile des Objektes verdecken den Laser. Lösung ist hier einfach den Laser passend zu bewegen.
Der zweite Punkt ist etwas komplizierter: Die Helligkeit.
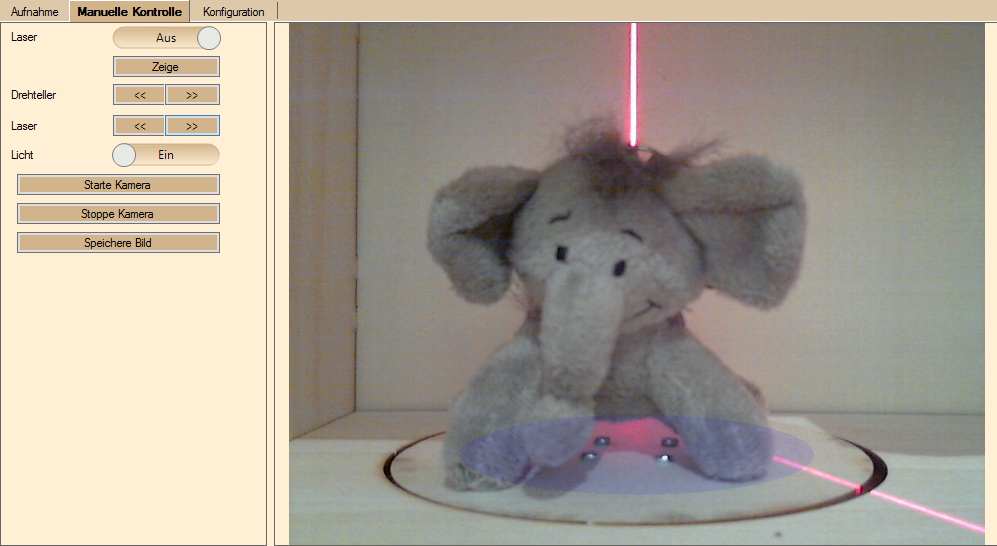
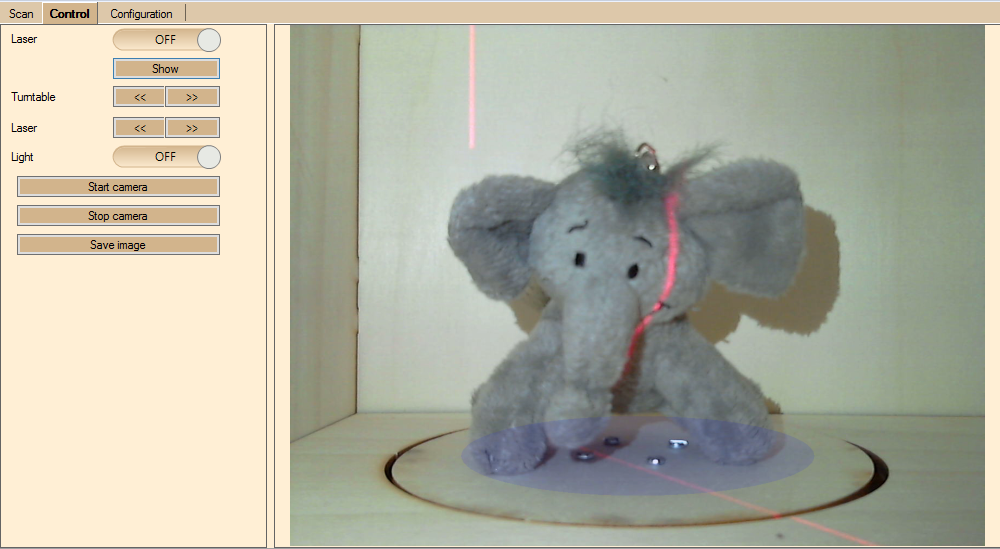
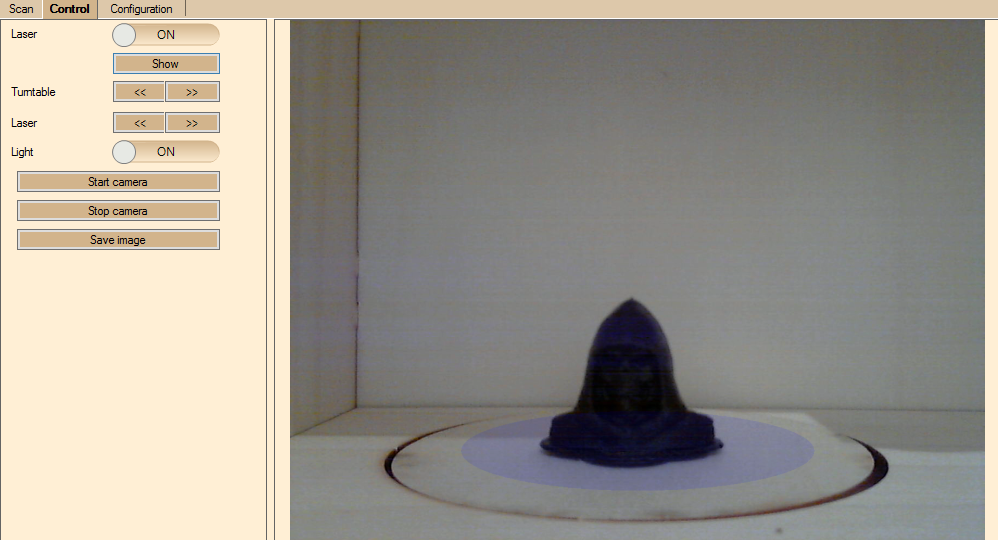
Nehmen wir erst einmal an, dass das Bild relativ dunkel ist.
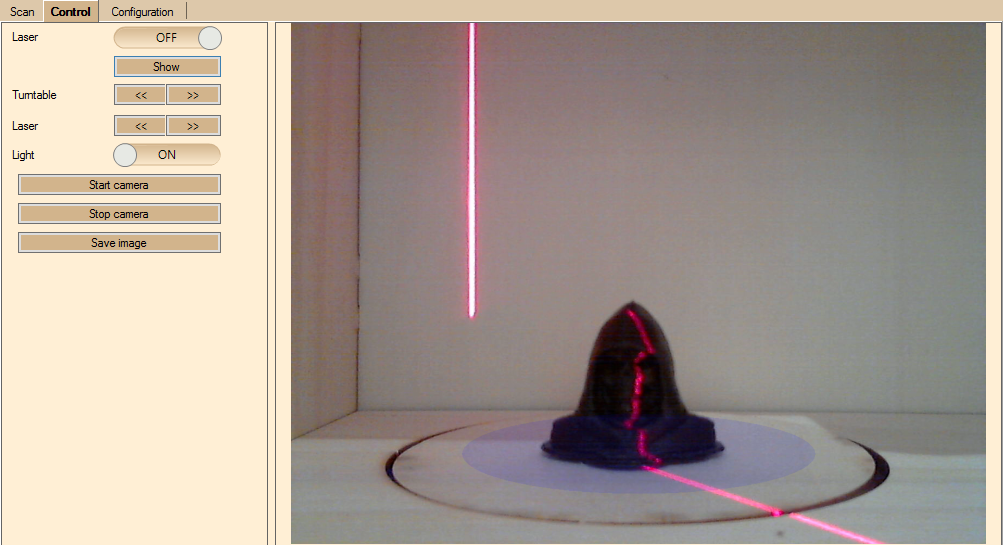
Schalten wir den Laser ein, ist er sehr gut auf dem Bild sichtbar.
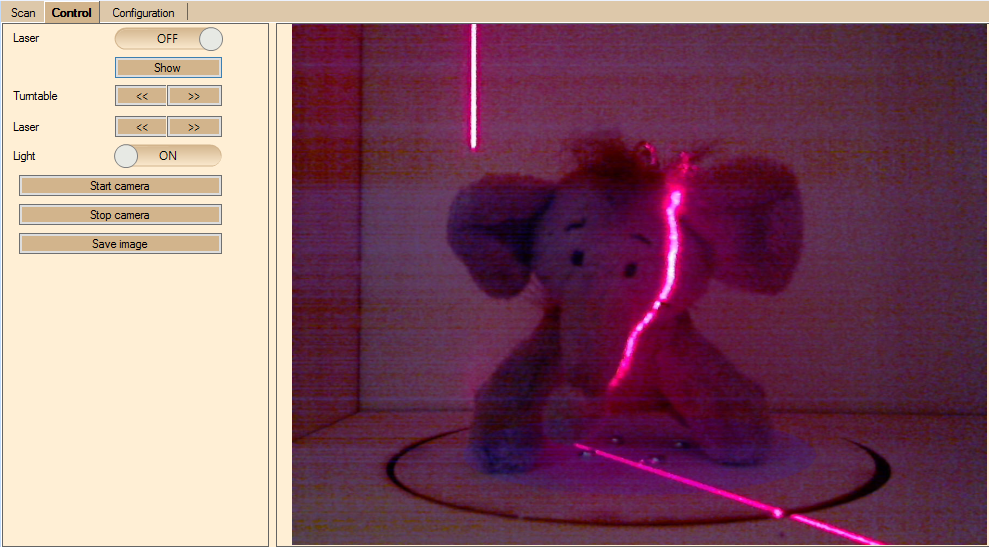
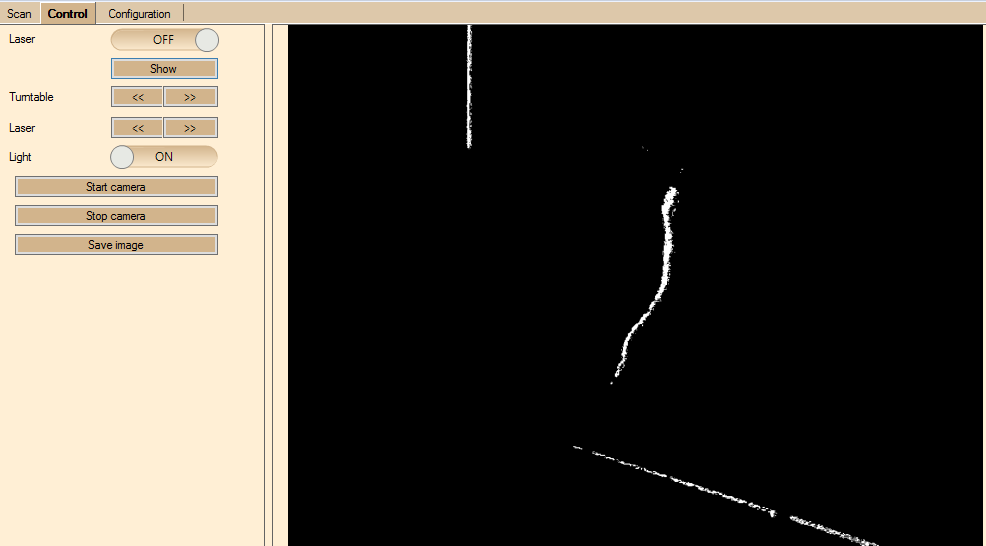
Wenn wir das erkannte Laserbild ansehen, so ist sowohl der Laser im Hintergrund, als auch auf dem Objekt gut sichtbar. Das heißt: In diesem Fall können wir das Objekt relativ gut erkennen (Farben werden allerdings entsprechend schwierig – nutzt dies jemand oder bleibt die Standardeinstellung mit SW-Punkten?).
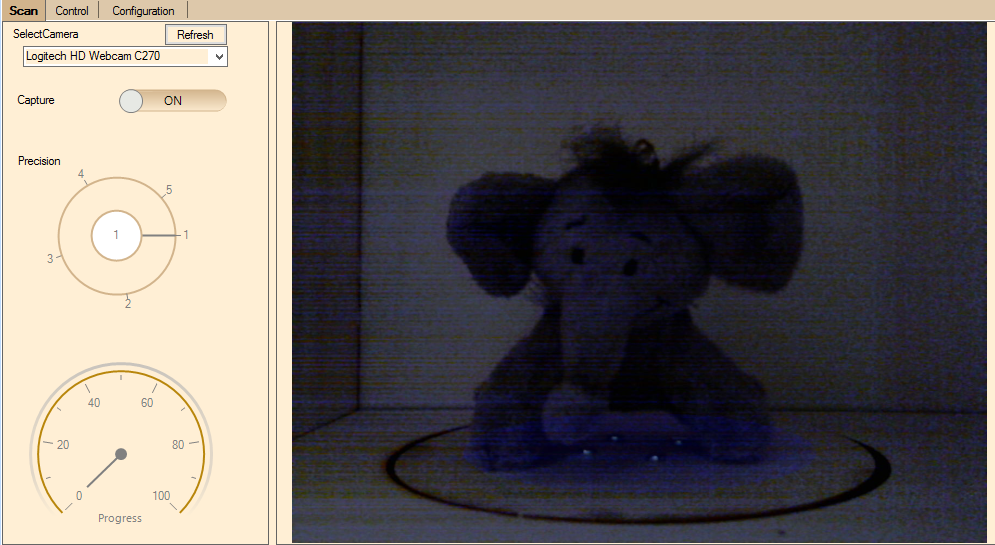
Nutzen wir nun zu viel Licht. Die Kamera zeigt wenig Rauschen, das Objekt ist klar sichtbar.

Wenn wir nun den Laser einschalten, wirkt er relativ unscheinbar.
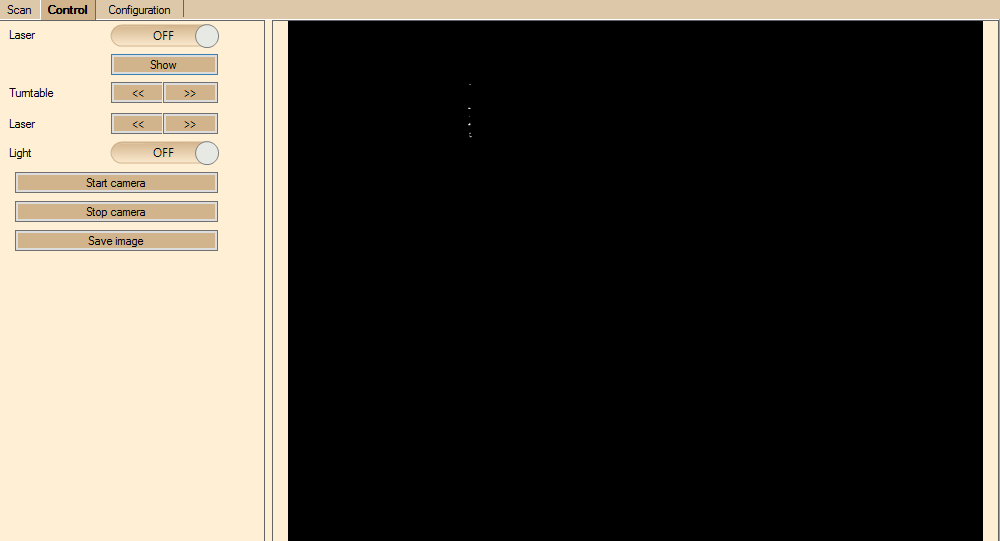
Noch besser sehen wir dies auf dem Laserbild – weder auf dem Hintergrund noch auf dem Objekt kann besonders viel erkannt werden.
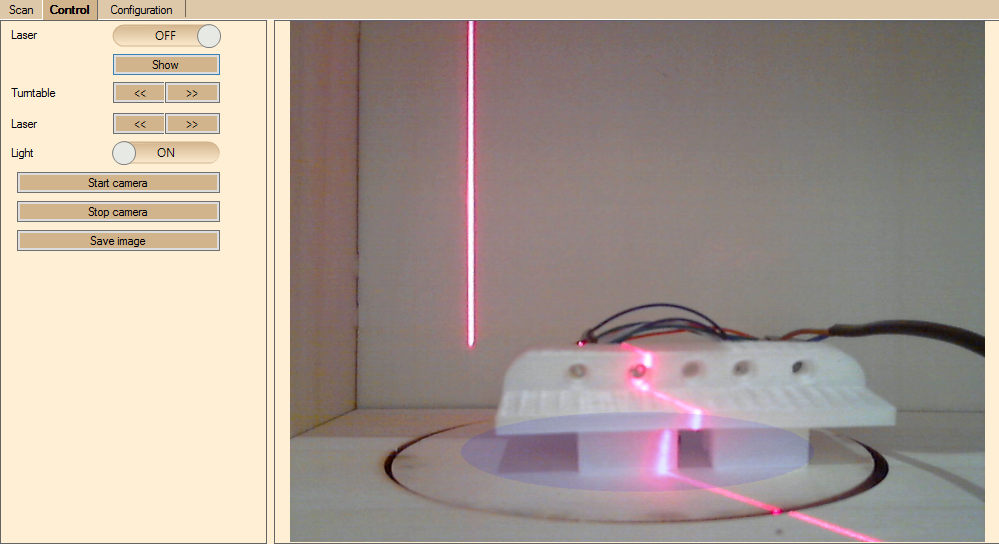
Sinn macht also eine mittlere bis etwas dunklere Helligkeit um Objekte zu erkennen. Wie sieht es aber mit dem Objekt selbst aus? Als erstes Demoobjekt nutze ich meine Scannerlichtleiste. 5 LEDs, davon 3 weiß und 2 blau ( erhöht den Kontrast zu dem roten Laser). Das Objekt ist aus weißem, leicht reflektierendem Kunststoff. Schon im normalen Bild sehen wir, dass der Laser auf dem Objekt stärker spiegelt und sehr kräftig herauskommt.
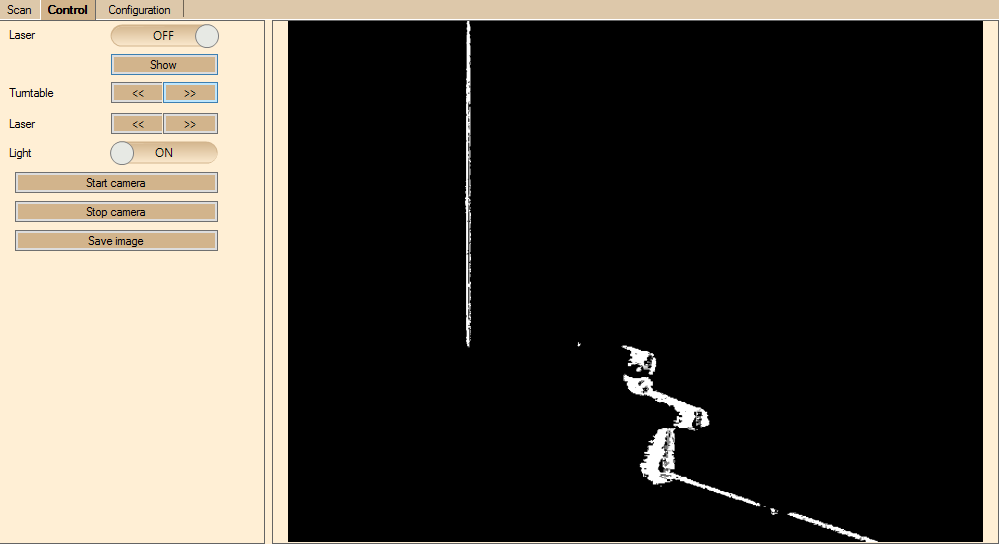
In dem Laserbild sehen wir dann – es ist eher Glückssache wo der Punkt genau erkannt wird. Das Laserlicht wird zu stark in der Breite reflektiert.
Nehmen wir zum Ausgleich ein dunkleres, nicht so stark reflextierendes Objekt (jap, Lichtleiste = hell, Skeletor = dunkel ist beabsichtiget 😉 ).
Der Laser ist schlechter auf dem Objekt zu sehen Michigan region phone , …
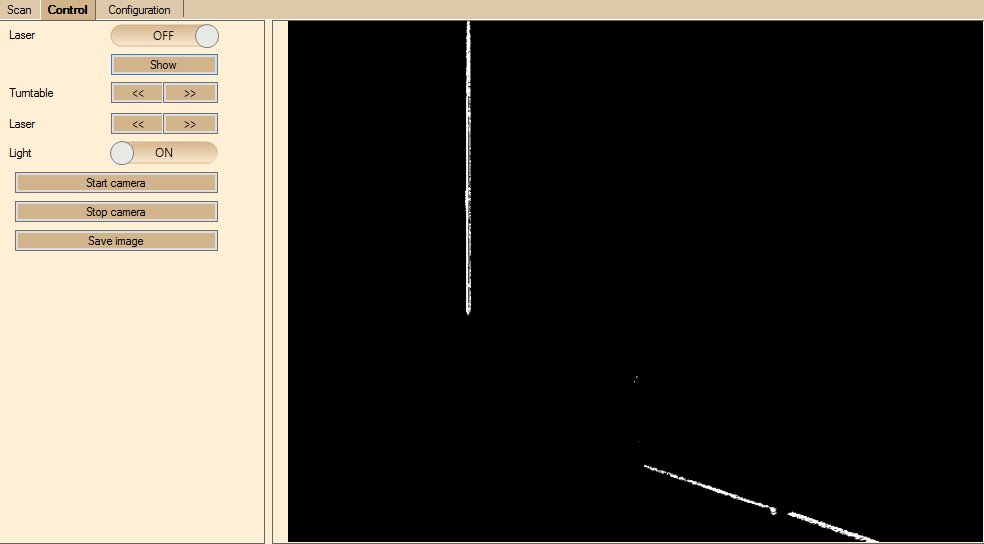
aber erst in dem Laserbild sehen wir, dass mit den Standardeinstellungen praktisch kaum ein Punkt auf dem Objekt stark genug ist, um erkannt zu werden. Dies ist genau das Problem, welches man bekommt, wenn man den Hintergrund des Scanners mattschwarz gestaltet – Störende Punkte auf dem Hintergrund fallen zwar weg – aber der Laser wird halt auch nicht mehr gefunden.
“Aber ich sehe doch auf dem Bild einen Laser – kann man den dann nicht hervorholen?” – Ja. Spielen wir etwas mit Filtern. Das Objekt ist relativ wenig rot. Also lassen wir doch mehr Rotwerte (untere Grenze 150) erkennen. Den Threshold verringern wir auf 10 und den Erosion Filter schalten wir ganz aus.
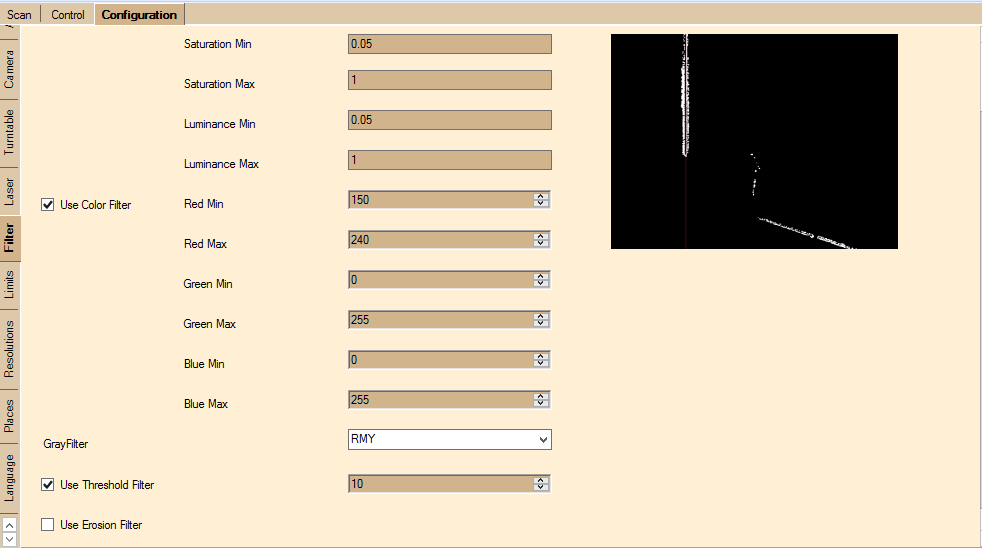
Jetzt sehen wir, dass die Software zumindest einige Punkte auf der Oberfläche erkennen kann. Die Laserlinie auf dem Hintergrund ist nun viel verschmierter zu erkennen – aber die grundsätzliche Position wird noch erkannt. Als Hintergrundinformation: der Bereich direkt neben dem Scanner wird von der Objekterkennung ausgenommen – daher gibt es dort meist keine senkrechte Linie – wird der verschmierte Bereich zu groß wird eine Art Ring entstehen.
Fazit:
- eher etwas weniger Licht beim Scannen nehmen
- bei den zu scannenden Objekten müssen eventuell Filter angepasst werden, da ansonsten keine Punkte auf dem Objekt erkannt werden können.
Fall jemand das Problem mit 0 Byte Scans hat – bitte die Logdatei des Programms und ein oder 2 Demobilder schicken. Dann weiß ich eher was passiert.
Hallo Wolfgang,
erst mal vielen Dank für Deine tolle Software.
Ich habe bei dem Laser einen weiteren Motor angebracht, da einige kantige Objekte sonst “tote” Stellen aufweisen, die von der Kamera nicht erkannt werden konnten. Wenn ich das Feature aktiviere, sind die Scans jedoch sehr verrauscht.
Hier ist mein Beispiel Scan: https://i.imgur.com/ooIxgUF.png (Die Fehler mitten im Raum sind mir nicht so wichtig, die könnte man ja leicht manuell entfernen, aber das Objekt ist halt leider auch verrauscht)
Vielleicht hast Du ja eine Idee, woran das liegen könnte?
Grüße, Eugen
Hallo Eugen,
Stimmen die Abstände bei Kamera und Laser?
Ist das ein spiegelnder Hasen-3D Druck?
Gruß
Wolfgang
Hallo,
vielen Dank, dass du dir Zeit für die Software genommen hast!
Ich habe nach dem ersten Einsatz folgendes Problem:
wenn ich einen Scan durchführe, sind die ausgegebenen .asc files immer leer.
Die .psy files lassen sich nicht öffnen, da sie auch (fast) leer sind (ERROR- no header).
Was mache ich falsch?
Der Rest funktioniert einwandfrei.
LG,
Olli
Hi,
hast du
http://wolfgangschmidt.info/0-bytes/
und
http://wolfgangschmidt.info/simple3dscan-0-1-6-kurzinfos-zu-filtern/
schon angesehen?
Gruß
Wolfgang
P.S. den Beitrag unter Impressum werde ich am WE löschen, bitte schreibe unter dem 0.Bytes Beitrag (leider kann ich hier nichts verschieben)Hab ein Plugin zum Verschieben gefunden 🙂